
loading...
Humanoid robots have been driving massive investment and widespread attention in the past few years. According to Mordor Intelligence, the humanoid robot market is estimated at USD 3.93 billion in 2026 and is expected to reach USD 17.80 billion by 2031, with a CAGR of 35.26%[1].
In a humanoid robot, the humanoid robotic arm is one of the most essential components. It allows the robot to reach, grasp, lift, operate tools, and interact with the physical world in a more human-like way.
In this article, we will explain what a humanoid robotic arm is, the main types of humanoid robotic arms, how a humanoid robotic arm works, its key components, and how it differs from a traditional industrial robotic arm.
A humanoid robotic arm is a bionic robotic arm designed to replicate the joint structure and motion range of the human arm. It can bend, rotate, reach around obstacles, work in confined spaces, and interact safely alongside people.
A humanoid robotic arm is an integrated system of several core subsystems working in concert.
1. Joints
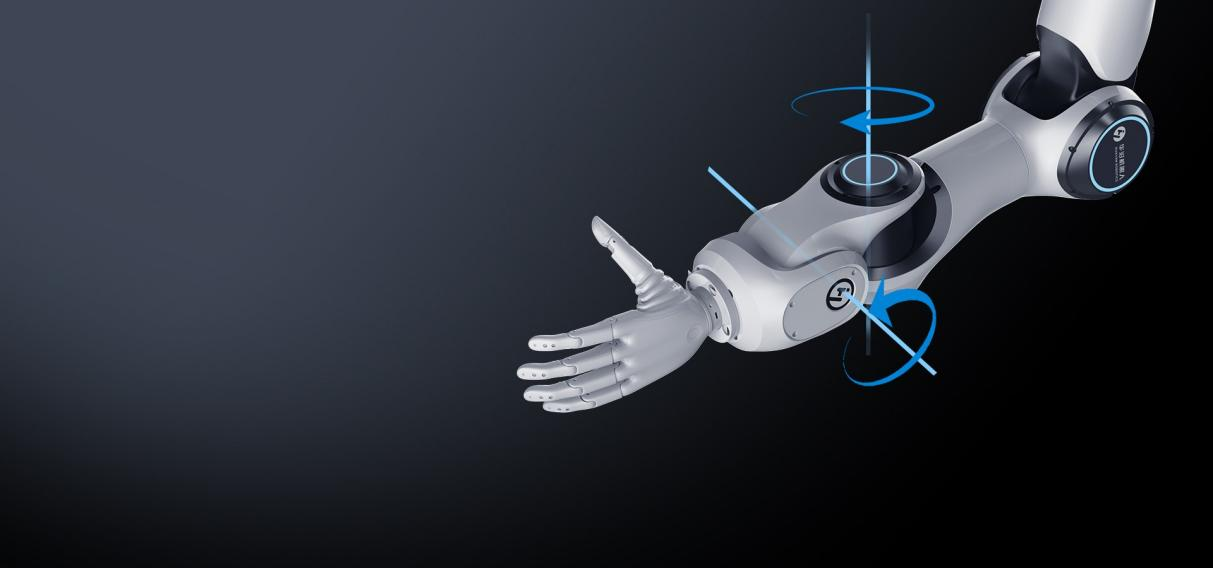
Joints are the rotational hubs that connect the arm’s links and give it its degrees of freedom. In a humanoid robotic arm, the arrangement of joints is designed to replicate the human shoulder, elbow, and wrist.
2. End Effector
The end effector is the “hand” at the tip of the arm, i.e., a gripper, dexterous hand, tool, or sensor package that performs the actual task, whether that’s grasping, welding, screwing, or inspecting.
3. Actuators
Actuators are the muscles. Most commonly electric motors paired with reducers, they convert control signals into the torque that moves each joint.
4. Sensor
Sensors are the nervous system. Joint encoders track position, while torque and force sensors measure interaction forces, allowing the arm to feel its environment and respond compliantly. Some designs feature end-effector cameras which add vision for guidance and inspection.
5. Controller
Controllers are the brain. They run the motion planning and force-control algorithms, coordinate every joint, and process sensor feedback in real time. A capable controller (such as Huayan’s humanoid robotic arm controller) can even operate multiple arms simultaneously.
A humanoid robotic arm works through a coordinated system of actuation, sensing, and feedback.
The controller first receives motion commands from software, perception systems, or a higher-level robot brain. These commands may come from a programmed path, an AI planning system, a teleoperation device, or a sensor-based decision process.
After the controller calculates the required motion, it sends signals to the actuators in each joint. The actuators then generate torque and drive the joints. In many electric motor-driven robotic arms, this motion passes through a reduction mechanism, such as a gear reducer or harmonic reducer, to improve torque output and control accuracy.
In the meantime, joint encoders measure the position and speed of each joint, and torque sensors help detect the force applied at the joints. This feedback is continuously sent back to the controller, allowing it to compare the actual motion with the commanded motion and make real-time adjustments when necessary.
As each joint moves, the whole arm changes posture. The end effector, such as a gripper, tool, or dexterous hand, reaches the target position and performs the task.
Humanoid robotic arms can be classified along two dimensions: how many degrees of freedom they have, and how their joints are actuated.
1. By Degrees of Freedom (DOF)
Degrees of freedom describe the number of independent ways an arm can move. More DOF generally means more human-like flexibility and a greater ability to reach a target from multiple angles.
2. By Actuation Method
Another way to classify humanoid robotic arms is by how their joints are powered.
Humanoid robotic arms and industrial robotic arms mainly differ in structural design, the type of end effector used, payload capacity, precision and repeatability, application scenarios, and safety requirements.
| Comparison Point | Humanoid Robotic Arm | Industrial Robotic Arm |
| Structural Design | Designed to imitate the human arm structure and motion logic. Often uses 7 DOF for greater flexibility. | Designed for efficient repetitive motion in structured industrial environments. |
| End Effector | May use grippers, dexterous hands, sensors, or tools for human-like interaction. | Often uses task-specific tools such as welding guns, suction cups, grippers, or screwdrivers. |
| Payload Capacity | Usually balances payload with lightweight design, compact size, and flexibility. | Often designed for higher payload, longer reach, or high-speed production tasks. |
| Precision and Repeatability | Focuses on flexible motion, compliant interaction, and adaptive manipulation. | Focuses on high repeatability, cycle time, and stable operation on fixed production lines. |
| Application Scenarios | Humanoid robots, embodied intelligence, service robots, research, education, healthcare support, and flexible automation. | Welding, palletizing, packaging, painting, and other fixed industrial processes. |
| Safety Requirements | Needs force control, torque sensing, compliant motion, and safe interaction in shared environments. | Often works behind safety fences or in controlled work cells. |
The Huayan Echo and HY Series are 7-axis humanoid robotic arms built as core execution components for embodied intelligence. Designed to integrate efficiently into quadruped, humanoid, and other embodied robotic platforms, the lineup includes six models with rated payloads ranging from 3 kg to 15 kg.
Every model is a 7-DOF robotic arm with full-joint force control, torque sensors standard on all joints, and a lightweight design (the arms themselves weigh under 8 kg to under 22 kg depending on model).
A large hollow design, with a minimum internal routing diameter of 15 mm, lets Gigabit Ethernet/GMSL, power, and signal cables run cleanly inside the arm with no exposed wiring.
On the intelligence side, the arms integrate with a local AI server and are natively compatible with ROS2, with edge decision-making that lets them detect deviations, identify anomalies, and adjust trajectories in real time.
They also support SDK, native ROS2, and open protocols for faster integration, run quietly at ≤45 dB, carry an IP54 rating, and a single controller can drive up to four humanoid robotic arms at once.

A humanoid robotic arm is a bionic robotic arm that recreates the structure and motion of the human arm to deliver flexibility, dexterity, and safe interaction.
As embodied intelligence continues to advance, 7-DOF robotic arms like the Huayan Echo/HY Series are setting the standard for what a humanoid robotic arm can do.
Get in touch with us to see how they fit your application.
Reference
[1] https://www.mordorintelligence.com/industry-reports/humanoids-market

